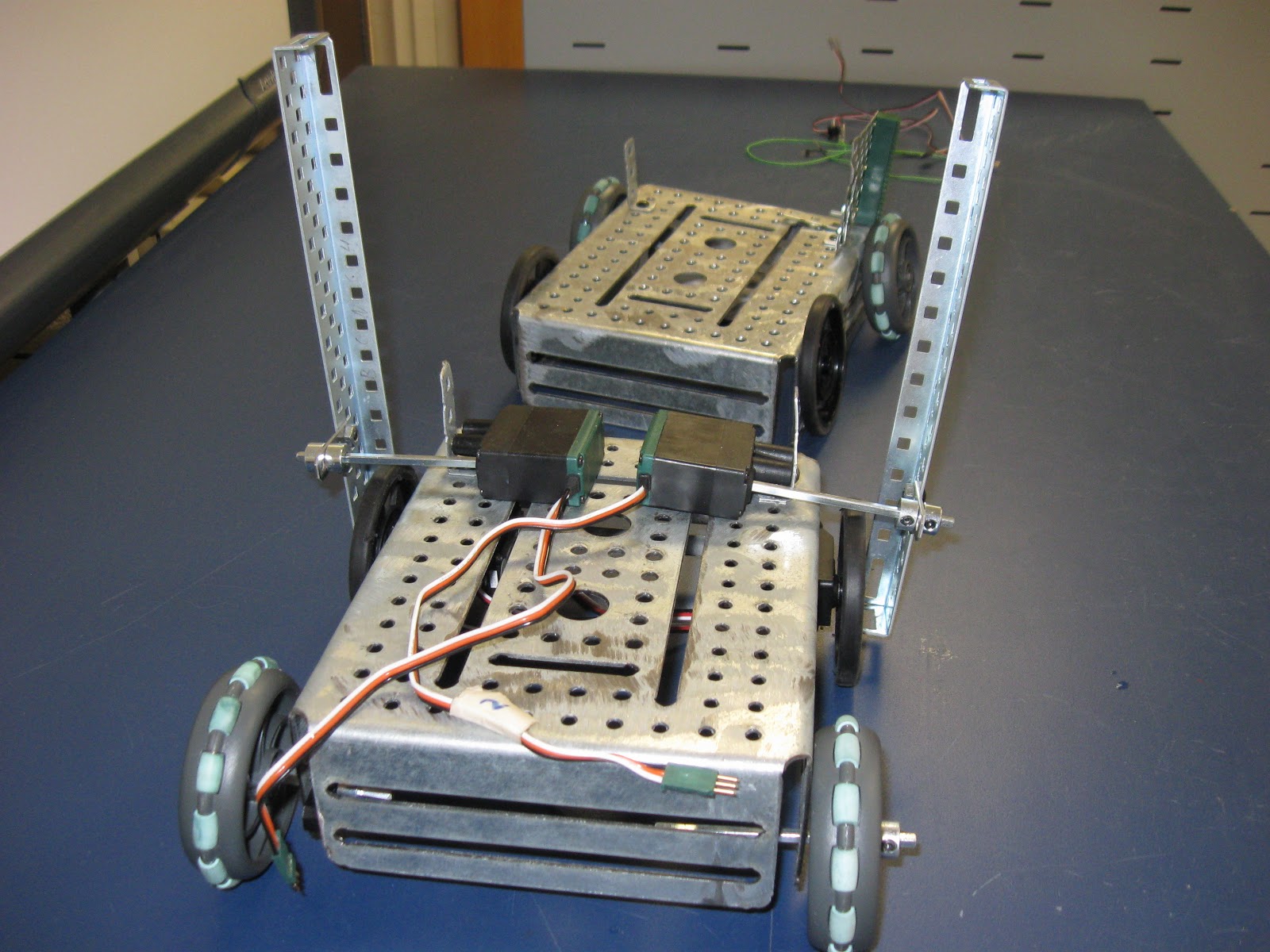
The STEM Robotics Competition of 2012 was great fun! We had students from elementary, middle and high school competing in 2 different levels of robotics competition. Some of our LHS Level 1 & Level 2 bots, run by the Propellar board:



Our students also made the animatronic wolf for the TSA competition. It moves his head side to side, shakes paws, and has pneumatic rear legs for standing up.


To demo our prototyping machine to the freshman CAD class this year, I used a lightsaber STL file at 0.35 scale and another 4 of them at 0.10 scale, seen here with a referral and a LEGO clone trooper. They still have to go into a 4 hour chemical bath that will eliminate the supprt (black) plastic to expose the final white ABS plastic.

 The other parts of the glasses system:
The other parts of the glasses system: And the custom PROPELLAR circuit boards communicating through an XBEE. These boards (1 on the robot, one on the human) use the 9600 Baud rate of a common PS2 controller to make your robot do your bidding!
And the custom PROPELLAR circuit boards communicating through an XBEE. These boards (1 on the robot, one on the human) use the 9600 Baud rate of a common PS2 controller to make your robot do your bidding!























 A robot starts at one end and goes down a 35' track, through the 3 obstacles, and into the shack where our soldier is being held hostage.
A robot starts at one end and goes down a 35' track, through the 3 obstacles, and into the shack where our soldier is being held hostage.






 Next post, manipulators and end effectors!
Next post, manipulators and end effectors!
{kind=link}
{kind=link}